Приводы подач всех современных металлообрабатывающих станков с ЧПУ, в том числе и электроэрозионных (ЭЭ) строятся по традиционной схеме. Так, в одном из типажей ЭЭ станков перемещения рабочего органа РО (каретки подач) осуществляется от двигателя постоянного тока через ременную передачу на ходовой винт. Через шариковую гайку (она скреплена с РО пружинами механизма защиты от соударений) вращение винта трансформируется в продольное перемещение РО.
Более надежные и современные приводы выполнены без ременной передачи. В этих приводах высокомоментный двигатель переменного тока непосредственно соединен с ходовым винтом.
Недостатки указанных видов приводов достаточно известны и очевидны:
Поскольку эти недостатки определяют основные качественные характеристики приводов (точность и равномерность хода РО, величину мертвого хода при реверсе, допустимые ускорения и скорости РО), конструкторская мысль станкостроителей давно пытается как-то уменьшить их влияние на работу приводов и оборудования в целом. Например, в соединении ходового винта с гайкой для уменьшения трения уже давно используют дорогое и сложное шариковинтовое соединение; для ликвидации зазоров в соединение винта с гайкой вводятся специальные устройства натяга соединения; ходовые винты особо точных станков изготавливают по классу эталонных; погрешности шага винтов пытаются скомпенсировать системами компенсаторов; в борьбе с температурными деформациями создаются изощрённые системы охлаждения и т.д. Проблемы, проблемы, проблемы... И уже давно ясно, что проблемы приводов с ходовыми винтами не решить никогда из-за их физико-технической сущности и построенного типа, как такового.
Архаичность рассмотренных приводов давно очевидна и передовая конструкторская мысль уже много лет работала над задачей кардинальной замены типовых приводов в металлообрабатывающем оборудовании на какие-то другие, более совершенные. Как говорят, гениальное - просто. И таким гениальным решением было использовать в качестве приводов подач станков линейные двигатели . 
Принцип линейного двигателя (ЛД) не нов и, в общем, известен даже школьнику, поскольку прототипом ЛД является простейшая электромагнитная система. Такая система состоит из металлического сердечника-магнита и статорной обмотки. При подаче тока определенной полярности в обмотку сердечник сместится в ту или иную сторону, причем практически мгновенно. Изменение полярности сигнала на обмотку приведет к обратному ходу сердечника. Как видим, от источника энергии к РО нет никаких промежуточных элементов, передача энергии осуществляется через воздушный зазор, ничего не надо вращать, сразу возможно осуществление главной задачи - продольного движения РО. Гениальность решения, естественно, сразу была оценена по достоинству. На рассмотренном принципе уже десятилетия работают все элементы электроавтоматики, системы электротормозов, системы защиты, специальное оборудование ударного типа и т.д. Громадный опыт использования электромагнитных систем четко выявил их потрясающие достоинства: удивительная простота конструкции и применения, почти мгновенная остановка, мгновенный реверс, сверх быстрота срабатывания, большие усилия, простота настройки. Но не было только одного - возможности регулировать скорость РО в электромагнитной системе и обеспечивать тем самым регулируемое поступательное движение РО (сердечника). А без этой возможности применить электромагнитный привод (несмотря на его гениальность), как движитель в оборудовании, было невозможно.
Потребовались многие годы работы ученых и конструкторов в разных странах, прежде чем был достигнут успех. Особенно интенсивно велись работы в Японии, где электромагнитный привод (уже как линейный привод) был впервые успешно использован как движитель для сверхскоростных поездов. Там же были попытки создания линейных приводов для металлообрабатывающих станков, но они имели существенные недостатки: создавали сильные магнитные поля, грелись, а главное не обеспечивали равномерности в движении РО. Лишь на пороге нового тысячелетия начался серийный выпуск станков (пока в основном электроискровых (электроэрозионных)) с принципиально новыми линейными двигателями, в которых решены все проблемы по обеспечению равномерным движением РО станков со сверхвысокой точностью, с большим диапазоном регулирования скорости, с громадными ускорениями, мгновенным реверсом, с простотой обслуживания и наладки и др.
В принципе, конструкция ЛД изменилась не сильно. Собственно двигатель состоит всего из 2 (!) элементов: электромагнитного статора и плоского ротора, между которыми лишь воздушный зазор. Третий обязательный элемент – оптическая или другая измерительная линейка с высокой дискретностью (0,1 мкм). Без нее система управления станка не может определить текущие координаты. И статор, и ротор выполнены в виде плоских, легко снимаемых блоков: статор крепится к станине или колонне станка, ротор - к рабочему органу (РО). Ротор элементарно прост: он состоит из ряда прямоугольных сильных (редкоземельных) постоянных магнитов. Закреплены магниты на тонкой плите из специальной высокопрочной керамики, коэффициент температурного расширения которой в два раза меньше чем у гранита. Использование керамики совместно с эффективной системой охлаждения решило многие проблемы линейных приводов, связанные с температурными факторами, с наличием сильных магнитных полей, с жесткостью конструкции и т.п.
Точная и равномерная подача РО во всем диапазоне скоростей и нагрузок обеспечивается двумя техническими решениями:
Компания "СОДИК" организовала на своих заводах серийный выпуск широкой гаммы ЛД с характеристиками: с ходом подач от 100 до 2220 мм, с максимальной скоростью перемещения РО до 180 м/мин с ускорениями до 20G (!!!) при точности исполнения заданных перемещений (в нормальном режиме работ) равной 0,0001мм (0,1 мкм). Нагрев этих ЛД при работе не превышает + 2° С от температуры помещения. Обеспечивается практически мгновенная остановка РО, реверс, моментальная реакция привода на команды системы ЧПУ и т.д. На один и тот же рабочий орган монтируется (например, для увеличения мощности) несколько линейных двигателей. Так, в частности, устроен привод оси Z всех ЭЭ прошивочных станков "СОДИК".
Как указывалось, и статор, и ротор ЛД предельно просты. Статор исполнен в виде прямоугольного блока и крепится несколькими болтами к несущей конструкции станка. В приводе оси Z - два статора. Они размещены по обе стороны вертикального ползуна. К каждому статору крепятся два патрубка системы охлаждения статора и кабели подвода энергии и управления. Пластина ротора жестко крепится болтами к подвижной каретке (РО). Так как в приводе оси Z два ЛД, то на каретке крепятся, соответственно, два ротора, каждый напротив своего статора. Система специальных направляющих и пневмопротивовес обеспечивают исключительную легкость хода каретки, практически без усилий. Приводы по осям X, Y прошивочных станков и в приводах X, Y, U, V проволочно-вырезных станков проще - в них всего по одному ЛД.
Особенно следует отметить простоту обслуживания ЛД, простоту периодической чистки (при необходимости), профилактики и ремонта. Так, чтобы заменить ротор ЛД, достаточно открутить несколько болтов, крепящих ротор к РО. Для замены статора помимо болтов нужно лишь снять две трубки системы охлаждения статора и отсоединить кабель. Сравните эти действия, например, с комплексом работ по снятию шаровой гайки или замене подшипника ходового винта.
Эффективность применения новых приводов сразу же нашло убедительное подтверждение. Новая серия ЭЭ станков с ЛД имеет резко повышенные технико-технологические и эксплуатационные характеристики по сравнению с аналогичными станками, имеющими традиционные приводы. Так, производительность ЭЭ прошивных станков с ЛД выше, чем у станков с обычными приводами как минимум в 2 раза, а ЭЭ проволочно-вырезных – на 50%. Повысилась точность станков, расширились диапазоны параметров обрабатываемых деталей и т.д. Для объяснения этого необходимо рассматривать определенные тонкости ЭЭ технологий и работы ЭЭ оборудования, а это уже тема другая.
Нижеследующая таблица позволяет зрительно сопоставить рассматриваемые привода.
| Сравнение традиционных и линейных приводов станков | ||
|---|---|---|
| Факторы, характеристики | Традиционные приводы с ШВП | Линейные приводы |
| Промежуточные элементы передачи к РО | Ротор, вал, шкив, ремень, шкив, винт, шарики, гайка | НЕТ |
| Передача энергии на РО | От статора электродвигателя на ротор, через вал ротора на шкив, на ходовой винт, на шарики гайки, на гайку и на РО | НЕТ |
| Потери на трение | Подшипники ротора, ременная передача, подшипники ходового винта, шарики, плоскости профиля канавки гайки | НЕТ |
| Элементы с упругими деформациями | Вал ротора, ремень шкива, вал винта, плоскости профиля канавки винта, шарики, плоскости профиля канавки гайки | НЕТ |
| Элементы с температурными деформациями в приводе | Ротор двигателя, вал ротора, подшипники ротора, шкив, ремень, шкив, подшипники винта, винт, шарики, гайка | НЕТ |
| Изнашиваемые элементы привода | Подшипники ротора электродвигателя, шкив, ремень, шкив, подшипники винта, ходовой винт, шарики, гайка | НЕТ |
| Обязательные зоны для смазки | Подшипники ротора, подшипники винта, зона ШВП | НЕТ |
| Элементы, создающие инерционные нагрузки при ускорениях и реверсе | Вращающийся ротор, вал ротора, внутренние кольца подшипников вала ротора, шкивы, ремень, подшипники винта, винт, гайка и шарики в поступательном движении | Плоский ротор привода в поступательном движении |
| Основные зоны загрязнения (уровень сложности очистки) | Подшипники вала ротора двигателя (сложно ), подшипники ходового винта (сложно ), ШВП-гайка (очень сложно ) | Зазор между статором и плоским ротора (просто) |
1. Введение.
2.2 Разновидности.
2.2.2 Дуговой двигатель.
2.2.3 Трубчатый двигатель.
2.3 Применение.
3.2 Применение.
4.1 Применение.
5. Вывод.
1. Введение.
Интересные и широкие перспективы развития электропривода связаны с применением так называемых линейных двигателей.
Большое число производственных механизмов и устройств имеют поступательное или возвратно-поступательное движение рабочих органов (подъёмно-транспортные машины, механизмы подач различных станков, прессы, молоты и т.д.). В качестве привода этих механизмов и устройств использовались обычные электродвигатели в сочетании со специальными видами механических передач (кривошипно-шатунный механизм, передача винт-гайка), преобразовавших вращательное движение рабочего органа.
Линейные двигатели могут быть асинхронными, синхронными и постоянного тока, повторяя по принципу своего действия соответствующие двигатели вращательного движения.
2. Линейный асинхронный двигатель.
2.1 Конструкция и принцип действия.
Наибольшее распространение получили асинхронные линейные двигатели. Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать (рис. 1) статор 1 и ротор 4 с обмотками 2 и 3 обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость, как это показано на рисунке. Образовавшаяся «плоская» конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки 2 статора такого двигателя подключить к сети переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью, пропорциональной частоте питающего напряжения и длине полюсного деления. Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки 3 ротора и индуктирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведёт к появлению силы, действующей, по известному правилу Ленца, в направлении перемещения магнитного поля. Ротор - в дальнейшем будем называть его уже вторичным элементом - под действием этой силы начнёт двигаться с некоторым отставанием (скольжением) от магнитного поля, как и в обычном асинхронном двигателе.
2.2 Разновидности.
2.2.1 Конструктивные параметры.
Представленная на рис. 2 конструкция представляет собой линейный двигатель с одинаковыми размерами статора и вторичного элемента. Помимо такой конструкции, в зависимости от назначения линейного двигателя вторичный элемент может быть длиннее статора (рис. 2а) или короче его (рис. 2б). Такие двигатели получили соответственно название двигателей с коротким статором и коротким вторичным элементом. Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Часто - и в этом одно из достоинств линейного асинхронного двигателя - в качестве вторичного элемента используется металлический лист (полоса), как показано на рис. 2д. Вторичный элемент при этом может располагаться также между двумя статорами (рис. 2в) или между статором и ферромагнитным сердечником (рис. 2г). Двигатель с конструктивной схемой, приведённой на рис. 2д, получил название двигателя с односторонним статором, со схемой по рис. 2в - с двусторонним статором и со схемой по рис. 2г - с односторонним статором и сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причём использование не магнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы, как, например, на рис. 2в, г. Некоторое распространение получили сложные составные вторичные элементы с прилегающими друг к другу полосами из немагнитного и ферромагнитного материала, при этом ферромагнитная полоса выполняет роль части магнитопровода. Принцип действия линейных двигателей с вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трёхфазного переменного тока. Отметим, что линейные двигатели очень часто работают в так называемом обращённом режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте.
2.2.2 Дуговой двигатель.
Дуговой двигатель характеризуется расположением обмотки на части окружности, как это показано на рис. 3.Особенностью этого двигателя является зависимость частоты вращения его статора 1 от длины дуги, на которой располагаются обмотки 2 статора 3.
Пусть обмотки статора располагаются на дуге, длина которой соответствует центральному углу α = 2τр, где τ - длина полюсного деления и p - число пар полюсов. Тогда за один период тока вращающееся поле статора совершит поворот на угол 2τр/р = α/р, а в течение одной минуты поле повернётся на n = α/p*60f/2π оборотов, т. е. будет иметь частоту вращения n, об/мин.
Выбирая различные α, можно выполнять дуговые двигатели с различными частотами вращения ротора.
2.2.3 Трубчатый двигатель.
Конструкция трубчатого линейного двигателя представлена на рис. 4.
Статор двигателя 1 имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки 2 (обмотки статора) и металлические шайбы 3, являющиеся частью магнитопровода. катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент 4 также трубчатой формы, выполненный из ферромагнитного материала.
При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуктирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создаёт на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
2.3 Применение.
Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей. Одно из них, уже отмеченное выше, определяется прямолинейностью движения вторичного элемента (или статора), что естественно сочетается с характером движения транспортных средств.
Другое, не менее важное обстоятельство связанно с независимостью силы тяги от силы сцепления колёс с рельсовым путём, что недостижимо длят обычных систем электрической тяги. Поэтому ускорения и скорости движения средств транспорта при использовании линейных двигателей могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колёс по рельсовому пути и дороге, динамической устойчивостью ходовой части транспорта и пути. Исключается при использовании линейных двигателей и буксование колёс электрического транспорта.
Одна из возможных конструктивных схем сочленения линейного двигателя с рельсовым транспортным средством показана на рис. 5.
Линейный двигатель, укреплённый на тележке 3 подвижного состава, имеет конструкцию с двусторонним статором 1. Вторичным элементом является укреплённая между рельсами полоса 2. Напряжение на статор двигателя подаётся с помощью скользящих контактов. Известны также конструкции линейных двигателей, где вторичным элементом являются рельс и элементы несущей конструкции. Такие схемы характерны, в частности, для монорельсовых пассажирских и грузовых дорог и механизмов передвижения кранов. На рис. 6 в качестве примера показаны отечественный линейный двигатель, сконструированный для монорельсовой дороги. Этот двигатель имеет двусторонний статор 1 с обмоткой 2, внутри которого находится вторичный элемент в виде полосы 3. Статор двигателя перемещается по полосе с помощью несущих роликов 5. Ролики 4 служат для взаимной фиксации статора и вторичного элемента в горизонтальном направлении.
Рис. 7
На рис. 7 показан пример использования линейных асинхронных двигателей для механизмов транспортировки грузов различных изделий.
Конвейер, предназначенный для перемещения сыпучего материала 1 из бункера 2, имеет металлическую ленту 3, укреплённую на барабанах 4. Металлическая лента проходит внутри статоров 5 линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить её проскальзывание, повысить скорость и надёжность работы конвейера.
Большой интерес представляет использование линейного двигателя для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Конструктивная схема такого молота, показана на рис. 8.Статор линейного двигателя 1 располагается на стреле молота 2 и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебёдки 3. Ударная часть молота 4 является одновременно вторичным элементом двигателя.
Для подъёма ударной части молота двигатель включается таким образом, чтобы бегущее поле было направленно вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебёдки.
Электрический молот, прост в изготовлении, не требует повышенной точности изготовления двигателей, не чувствителен к изменению температуры и может вступать в работу практически мгновенно.
3. Линейный двигатель постоянного тока.
Наряду с асинхронными линейными двигателями применяются линейные двигатели постоянного тока. Они чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных пусковых усилий.
3.1 Конструкция и принцип действия.
Линейные электродвигатели постоянного тока состоит из якоря с расположенной на нём обмоткой, служащей одновременно коллектором (направляющий элемент), и разомкнутого магнитопровода с обмотками возбуждения (подвижная часть), расположенными так, что векторы сил, возникающих под полюсами магнитопровода, имеют одинаковое направление. Кроме того, линейные двигатели постоянного тока (как и двигатели вращательного движения) позволяют при необходимости просто регулировать скорость движения рабочих органов.
3.2 Применение.
На рис. 9 показана схема линейного двигателя постоянного тока, который применяется для перемещения промышленных изделий. Этот двигатель по существу представляет собой двигатель постоянного тока с полым цилиндрическим якорем, разрезанный по образующей и развёрнутый в плоскость.
Подвижная часть двигателя - якорь - состоит из немагнитного остова 1 и укреплённой на нём обмотки 2 якоря, которая может быть выполнена из изолированного обмоточного провода или изготовлена из медной фольги путём её травления. Ширина витков обмотки в направлении движения, как и в обычных двигателях постоянного тока, близка к полюсному делению (т. е. расстоянию по окружности между полюсами магнитной системы двигателя). Токопровод к обмотке осуществляется с помощью коллектора 3 и щёток 4. На станине двигателя 5 крепится комплект полюсов 6 с обмотками возбуждения 7, размещённых в ряд по направлению движения якоря. Другими частями магнитопровода двигателя являются стальные сердечники 8 и сама станина, выполненная также из ферромагнитного материала. Якорь двигателя вместе со столиком 9 для крепления перемещаемого изделия 10 движется по неподвижным опорам 11 так, что его плоскости с обмотками всё время находятся в зазоре между сердечниками 8 и полюсами 6. На принципе работы линейного двигателя основано действие специальных насосов для перекачки электропроводящих жидкостей и в том числе жидких металлов. Такие насосы, часто называемые магнитогидродинамическими, широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя.
Магнитогидродинамические насосы (МГД - насосы) могут быть постоянного или переменного тока. Рассмотрим схему насоса постоянного тока.
Первичным элементом - статором двигателя является С - образный электромагнит 1. В воздушный зазор электромагнита помещается трубопровод 2 с жидким металлом. С помощью электродов 3, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего устройства. Часто обмотка возбуждения включается последовательно в цепь электродов 3. При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила. Под действием этой силы металл начнёт перемещаться по трубопроводу, причём направление его движения просто определить по известному правилу левой руки. Преимуществами МГД - насосов являются отсутствие движущихся механических частей, и возможность герметизации канала транспортировки металла.
4. Линейный синхронный двигатель.
В последние годы всё шире используются синхронные линейные двигатели. Основной областью применения этих двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности, и его применение оказывается экономически не выгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с коэффициентом мощности, близким к единице.
Следует отметить, что применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с так называемой магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
4.1 Применение.
На рис. 11 показана схема путепровода и вагона электропоезда со скоростью движения 400 - 500 км/ч, предназначенного для перевозки 100 пассажиров.
Рис. 11
Тяговый синхронный линейный двигатель имеет электромагнитное возбуждение с использованием сверхпроводящих магнитов. Обмотка возбуждения 1 состоит из ряда катушек, равномерно укреплённых под днищем вагона 5. В криогенной системе охлаждения обмоток используется жидкий гелий. Плоская трёхфазная обмотка переменного инвертора, преобразующего напряжения постоянного тока в трёхфазное напряжение переменного тока.
С помощью инвертора осуществляется пуск, изменение скорости движения и торможение поезда.
Путепровод 6 представляет собой бетонное полотно, плоский характер поверхности которого выбран с целью снижения накопления льда и снега. Вагон подвешивается над полотном дороги на высоте 15 см с помощью специальной системы магнитной подвески. Эта система состоит из удлинённых сверхпроводящих электромагнитов 3, расположенных по краям днища вагона, из плоских алюминиевых полос 4, укреплённых в полотне дороги. Принцип работы системы магнитной подвески основывается на действии электродинамических сил, возникающих при взаимодействии потоков сверхпроводящих электромагнитов 3 на борту вагона и вихревых токов, наведённых в алюминиевых полосках 4. Расчёты показали, что при использовании магнитной подвески масса вагона оказывается на 20 т меньше, чем при системе подвески на воздушной подушке.
Для обеспечения поперечной устойчивости поезда при его движении применяется специальная система стабилизации. Она предусматривает укладку дополнительной обмотки вдоль оси дорожного полотна и основана на взаимодействии токов в этой обмотке с полем тяговых электромагнитов. Разработанная система электрической тяги с применением описанного выше синхронного линейного двигателя отличается хорошими эксплуатационными показателями, однако для её работы необходима укладка обмоток в полотно дороги, что удорожает изготовление системы и усложняет её обслуживание, особенно при значительной протяжённости дороги. В связи с этим были разработаны конструкции линейных синхронных двигателей, которые не требуют укладки обмоток в железнодорожное полотно. К их числу относятся линейные синхронные двигатели с так называемым униполярным возбуждением и когтеобразными полюсами. Двигатели того и другого исполнения были использованы для привода 50 - тонного состава со скоростью движения 480 км/ч.
На рис. 12 показана схема синхронного линейного двигателя с униполярным возбуждением. Двигатель имеет два статора 1, установленных на подвижной части состава. Бегущее магнитное поле создаётся с помощью обмоток 2, подключаемых к сети переменного тока. Статоры соединяются магнитопроводом 3, на котором расположена обмотка униполярного возбуждения 4. Эта обмотка создаёт постоянный по направлению магнитный поток, который пронизывает ферромагнитный вторичный элемент 5, укладываемый в магнитопровод. Взаимодействие бегущего магнитного поля с намагниченным вторичным элементом создаёт силу тяги подвижного состава.
Сопоставление линейных синхронных двигателей с униполярным возбуждением и когтеобразными полюсами с асинхронным линейным двигателем на то же тяговое усилие показало, что последний имеет худший коэффициент мощности (около 0,6), более низкий КПД (около 80%) и большую массу на единицу мощности двигателя.
5. Вывод.
Применение линейных электродвигателей позволяет упростить или полностью исключить механическую передачу, повысить экономичность и надёжность работы привода и производственного механизма в целом.
6. Список литературы.
1. В.В. Маскаленко, Электрические двигатели специального назначения, Энергоиздат 1981.
2. Кавалёв Ю.М., Электрические машины, - М.: Энергия, 1989.
Принцип действия линейных пьезоэлектрических двигателей, совершающих относительно большие возвратно-поступательные перемещения (несколько миллиметров или сантиметров), не отличается от принципа действия вращающихся двигателей. На рис. 6.4,а представлена конструктивная схема линейного двигателя с вибратором, совершающим продольные (П) и изгибные (И) колебания. Неподвижный вибратор 1 прижимается силой F п. к подвижной части 3 через износостойкие прокладки 2. Подвижная часть представляет собой стальной позиционер 3, перемещающийся на роликах 4. Если фазы продольных и изгибных колебаний согласовать таким образом, чтобы при удлинении вибратора он прижимался к позиционеру через левую прокладку, то позиционер будет перемещаться влево. При укорочении вибратора он прижимается к позиционеру через правую прокладку и позиционер продолжает двигаться влево. Изменение фазы продольных колебаний на 180° вызывает возвратное движение позиционера. У линейных пьезодвигателей рассмотренных выше конструкций разрешающая способность по перемещению не превышает 1-10мкм.
Рисунок 6.4
В некоторых прецизионных технологических установках, используемых, например, при изготовлении интегральных схем, в военных насекомообразных мини- и микророботах требуются исполнительные механизмы, осуществляющие перемещение в десятые или сотые доли микрометров. В качестве таких исполнительных механизмов, работающих без механических преобразователей, могут использоваться линейные пьезоэлектрические двигатели микроперемещений с управляемой деформацией преобразователя . У этих двигателей (рис. 6.4,б) рабочее перемещение осуществляет сам стержень пьезоэлемента 2, который обычно выполняется в виде столбика из пьезокерамических шайб, склеенных между собой. На торцах стержня расположены зажимы 1 и 3. Если зафиксировать зажим 1 и подать на электроды пьезоэлемента постоянное напряжение, приводящее к удлинению стержня пьезоэлемента, то конец стержня с зажимом 3 переместится вправо. Перемещение будет зависеть от приложенного напряжения. При использовании керамики с относительным удлинением (5-7)*10 -4 стержень длиной 50мм может обеспечить перемещение до 25мкм.
На этом же принципе могут быть построены и линейные шаговые двигатели с шагом в доли микрометров. После того, как правый конец стержня (рис. 6.4,б) переместился на заданный шаг, фиксируется зажим 3, освобождается зажим 1 и снимается напряжение с пьезоэлемента. Стержень сжимается до исходной длины, и его левый конец подтягивается к правому. После этого вновь фиксируется зажим 1, освобождается зажим 3 и подается напряжение на пьезоэлемент. В результате происходит шаговое перемещение двигателя и связанного с ним объекта управления на требуемое расстояние. Частота отработки шагов достигает 30-50 Гц. Весьма сложным узлом такого шагового двигателя является устройство фиксации зажимов на каждом шаге.
В заключение следует отметить основные достоинства и недостатки вращающихся и линейных пьезодвигателей. Важнейшими достоинствами пьезодвигателей, особенно при их использовании в робототехнических и компьютерных устройствах, являются следующие:
1. Высокая разрешающая способность по перемещению: до 1-10мкм в режиме преобразователя колебаний и до 0,01мкм – при использовании управляемых деформаций преобразователей.
2. Высокое быстродействие: время разгона и торможения составляют единицы миллисекунд.
3. Пьезоэлектрические двигатели обладают значительным усилием самоторможения при снятии напряжения питания за счет сил трения.
4. Диапазон регулирования скорости пьезодвигателей достигает 10 6 .
Пьезодвигатели хорошо встраиваются (интегрируются) в сложные механические узлы и применяются в приводах устройств считывания и записи информации ЭВМ, магнитофонов, видеомагнитофонов и киноаппаратов. Применение линейных пьезодвигателей для позиционирования считывающей головки позволяет повысить плотность записи на магнитных дисках в 2-3 раза.
Возможность получения у пьезоэлектрических исполнительных механизмов до 5 степеней свободы при минимальных угловых и линейных перемещениях звеньев определяет возможность их широкого применения в прецизионных системах автоматизации и управления. Например, в астрономии, в космических исследованиях – там, где требуется точная ориентация по весьма малым объектам; в ускорителях заряженных частиц, где необходимо удерживать пучок частиц в строго ограниченных геометрических координатах; в кристаллографических исследованиях.
Однако использование пьезодвигателей в исполнительных механизмах связано с рядом сложностей. Существенная зависимость резонансной частоты преобразователя от напряжения питания электродов, момента нагрузки и момента инерции на валу двигателя затрудняет обеспечение оптимального преобразования энергии. Регулировочные характеристики двигателя нелинейные, параболические; имеется довольно широкая зона нечувствительности. Механические характеристики довольно мягкие и имеют вид гипербол.
Компенсация этих недостатков может быть осуществлена путем выполнения исполнительного механизма с обратной связью по скорости. Обратная связь может быть реализована либо с непосредственным использованием измерителей скорости типа тахогенераторов, либо косвенным методом, основанным на том, что угловая скорость ротора пропорциональна активной мощности, потребляемой электронным преобразовательным устройством. При этом необходимо применение специальных способов управления высокочастотными источниками питания пьезоэлементов, которые при существенной нелинейности характеристик самих пьезопреобразователей и нелинейности механических и регулировочных характеристик двигательной части могли бы обеспечить устойчивую работу при сильных случайных возмущениях. На практике для обеспечения требуемых статических и динамических характеристик при регулировании или стабилизации скорости применяются:
- амплитудный способ, основанный на регулировании амплитуды напряжения на электродах пьезоэлемента,
- амплитудно-фазовый способ, основанный на регулировании амплитуды напряжения и сдвига по фазе тока на электродах пьезоэлемента.
Пьезоэлектрические двигатели теоретически могут иметь весьма высокие силовые и энергетические характеристики, т.к. только пьезоэлектрическая керамика преобразует электрическую энергию в механическую с КПД, превышающим в ряде случаев 90%. Однако потери мощности в остальных частях двигателя приводят к тому, что КПД реальных микродвигателей мощностью до 10Вт не превышает 10 – 25%.
Серийный выпуск и применение пьезодвигателей сдерживается сложностью изготовления хороших пьезокерамических и износостойких материалов. С этим связано в настоящее время ограничение мощности пьезодвигателей уровнем порядка 10Вт. Быстрый износ деталей, контактирующих в процессе передачи движения, ограничивает срок службы двигателей.
К настоящему моменту можно выделить несколько типов линейных непосредственных двигателей (далее будем называть их просто линейными двигателями): асинхронный, постоянного тока, синхронный на постоянных магнитах (вентильный), шаговый.
Еще в начале ХХ века (02.06.1906 №12581) в Англии Зеденом был зарегистрирован патент на изобретение линейного асинхронного двигателя. Приведем выдержку из этого патента.
"Изобретение относится к устройствам для приведения в движение железнодорожных экипажей, лифтов, возвратно-поступательных частей машин, станков и других приспособлений посредством движущегося (бегущего) магнитного поля. В применении к железным дорогам магнит (индуктор), возбуждаемый трехфазным или иным током, устанавливается на экипаже вблизи от рельса (полосы), который играет роль короткозамкнутого якоря многофазного двигателя. Полоса может быть выполнена из стали и латуни или другого металла, и в ней для экономии массы и регулирования тока проделаны отверстия (перфорации) различной ширины - для обеспечения пуска экипажа и т. п. Магниты (индукторы) могут быть установлены над или под полосой для увеличения сцепления или частичной компенсации массы экипажа. Они могут быть расположены с противоположных сторон полосы, либо электромагнит (индуктор) может быть расположен с одной стороны полосы, а шихтованный пакет стали - с другой. Устройство может быть таким, что силы уравновешиваются или не уравновешиваются. В случае лифта, например, индукторы направлены наружу для взаимодействия с двумя направляющими полосами".
Характерно, что практически все конструкции современных линейных асинхронных двигателей в той или иной мере используют положения этого патента, исключения составляют лишь несколько специальных типов двигателей.
Одним из первых линейных асинхронных электроприводов со значительным поступательным перемещением и большой, хотя и кратковременно реализуемой мощностью следует считать систем разгона самолетов, разработанную в 1945 г. фирмой "Вестингауз" для флота США. Первичная часть двигателя укреплялась на тележке, на которой устанавливался разгоняемый самолет. К тележке подводилось трехфазное питание с одной заземленной фазой. Неподвижная вторичная часть имела в длину несколько сотен метров и представляла собой набранный из стальных пластин магнитопровод с короткозамкнутой клеткой из медного сплава (большим сопротивлением по краям пути и меньшим в середине пути). Двигатель развивал силу тяги 75 кН при скоростях от 0 до 100 м/с, то есть имел мощность порядка 7500 кВт. Реактивный самолет массой 4,5.103 кг разгонялся на полосе длиной 165 за 4,2 с до скорости 50 м/с (а=12 м/с2, F=ma=55 кН, остальные 20 кН тратились на преодоление сопротивления воздуха и для подъема).
Огромное число разработок проводилось и проводится до сих пор в плане использования линейных асинхронных двигателей в качестве приводящих устройств транспортных средств. Причем, разработки велись как по пути развертывания двигателей вращательного движения в плоскость, так и совершенно автономно (это касается не только асинхронных двигателей).
Линейные асинхронные двигатели имеют ряд преимуществ и недостатков, обуславливающих их область применения. К преимуществам можно отнести невысокую стоимость комплектующих, отсутствие необходимости наличия датчика для движения, достижимость высоких значений скоростей и ускорений. К недостаткам: необходимость небольшого воздушного зазора, низкий КПД (невозможность работы из-за значительных потерь во вторичной части на низких скоростях и в режиме поддержания силы). Отсюда и область его применений - транспортные задачи, требующие больших скоростей и ускорений, плавности хода, но не требующие высокой точности.
С развитием технологии изготовления постоянных магнитов, а в частности с появлением таких сплавов, как сомарий-кобальт и неодим-железо-бор, получили развитие и электрические машины с постоянными магнитами. Вентильные электроприводы с двигателями с возбуждением от постоянных магнитов являются на сегодняшний день наиболее эффективными и наиболее динамичными. В настоящий момент можем наблюдать бурное развитие систем с непосредственным приводом на основе вентильных двигателей. Это касается и двигателей вращательного движения, и линейных двигателей. Линейные вентильные двигатели непосредственного привода призваны заменить всевозможные передаточные устройства в системах автоматической обработки и точного позиционирования.
Сейчас можно выделить два основных принципиально различных типа линейных вентильных двигателей: линейный вентильный двигатель с ферромагнитным якорем и линейный вентильный двигатель с немагнитным якорем. Причем, не имеет значения якорь или индуктор движется, хотя предпочтительным в настоящее время является передвижение обмоток (якоря), нежели магнитов (индуктора).
Линейные двигатели с ферромагнитным якорем получили значительное развитие и сейчас компании производители таких двигателей могут предложит машины с тяговыми усилиями от 200 Н до 20 кН, что перекрывает значительный диапазон задач даже тяжелого станкостроения. Область применения этих двигателей постепенно расширяется и включает уже любое станочное оборудование, требующее быстрых и стабильно точных перемещений, например установки для лазерной резки и многофункциональные станки, в частности, для твердого точения и шлифования. В таких станках, выпускаемых в мире несколькими фирмами, при точении используют высокую динамику линейных двигателей, а при шлифовании - обеспечиваемую ими высокую точность перемещений. Отсутствие износа и возможность выполнения этими двигателями частых быстрых и коротких ходов особенно востребованы в шлифовальных станках, поскольку шарико-винтовые передачи нередко не выдерживают такого темпа и выходят из строя.
На рис.1 приведен такой двигатель. Индуктор выполнен в виде разомкнутой полосы постоянных магнитов. Якорь выполнен в едином корпусе и состоит из многофазной системы обмоток и ферромагнитной пластины, замыкающей поток индуктора. Якорь закреплен на транспортной пластине, которая может совершать возвратно-поступательные движения по линейным направляющим качения. На рис.1 не виден датчик перемещения, который установлен также на исполнительном органе. Через гибкий кабель-канал к якорю и к датчику подведены кабели соответственно питания обмоток и обратной связи (сигналов датчика линейного перемещения).
Рис. 1 Линейный двигатель с ферромагнитным якорем
Такая конструкция линейного вентильного двигателя явилась следствием прямого развертывания синхронной машины вращательного движения с постоянными магнитами в плоскость. Хотя эти двигатели являются на сегодняшний день основными конкурентами шарико-винтовых передач, тем не менее в связи с присутствием в них некоторых особенностей (а именно наличие потерь "в стали" якоря и наличие значительного притяжения исполнительного органа к индуктору), развитием таких направлений как лазерная и термическая обработка явили миру принципиально новую конструкцию линейных вентильных двигателей. Именно требования сокращения потерь в преобразовании энергии и увеличения номинальных скоростей и ускорений привели к появлению и активной разработке линейных вентильных двигателей с немагнитным якорем.
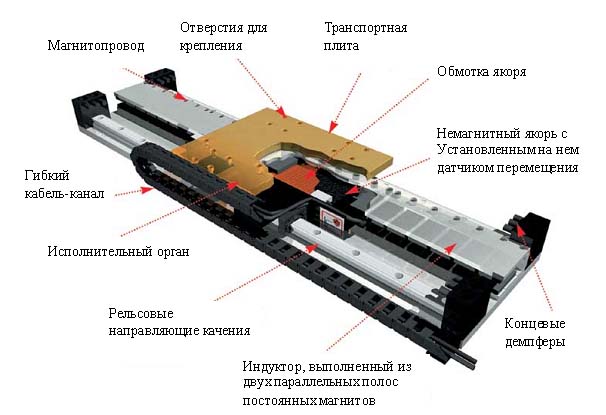
Рис. 2. Линейный вентильный двигатель с немагнитным якорем.
На рис.2 представлен пример такого двигателя (Trilogy systems, США). В отличии от предыдущего двигателя, якорь двигателя с немагнитным якорем не содержит магнитопровдящих частей (из-за этого он так и назван) и выполнен в виде системы многофазных обмоток. Индуктор выполнен в виде двух стальных пластин, с установленными на них постоянными магнитами и скрепленными в единый блок, который в сечении напоминает букву U. Поэтому в англоязычных источниках можем встретить другое название таких двигателей - U-образные линейные двигатели.
Подавляющее большинство электродвигателей является электродвигателями вращательного движения. В то же время многие рабочие органы производственных машин должны по технологии своей работы осуществлять поступательное (например, конвейеры, транспортеры и др.) или возвратно-поступательное движение (механизмы подачи станков, манипуляторы, поршневые и другие машины).
Преобразование вращательного движения в поступательное осуществляется посредством специальных кинематических звеньев: винт-гайка, шарико-винтовая передача, шестерня-зубчатая рейка, кривошипно-шатунная передача и другие.
Естественным для конструкторов рабочих машин является желание использовать для привода рабочих органов, совершающих поступательное и возвратно-поступательное движение, двигателей, ротор которых движется линейно.
В настоящее время получают развитие электроприводы, использующие линейные асинхронные, вентильные и . Принципиально линейный двигатель любого типа может быть образован из двигателя вращательного движения путем линейной развертки цилиндрического статора в плоскость.
Представление об устройстве линейного асинхронного двигателя можно получить, если развернуть статор асинхронного двигателя в плоскость. При этом вектор намагничивающих сил статора будет линейно перемещаться вдоль развертки статора, т.е. при этом образуется не вращающееся (как в обычных двигателях), а бегущее электромагнитное поле статора.
В качестве вторичного элемента может использоваться ферромагнитная полоса, располагаемая с небольшим воздушным зазором вдоль развертки статора. Эта полоса играет роль короткозамкнутого ротора. Вторичный элемент увлекается движущимся полем статора и линейно перемещается со скоростью, меньшей скорости движения поля статора на величину линейного абсолютного скольжения.
Линейная скорость бегущего электромагнитного поля будет
![]()
где τ, м - полюсное деление - расстояние между соседними полюсами линейного асинхронного двигателя.
Скорость вторичного элемента
![]()
где sЛ - относительное линейное скольжение.
При питании двигателя напряжением стандартной частоты получаемые скорости поля будут достаточно велики (более 3 м/с), что затрудняет использование этих двигателей для привода промышленных механизмов. Такие двигатели применяются для высокоскоростных транспортных механизмов. Для получения более низких скоростей движения и регулирования скорости линейного асинхронного двигателя его обмотки питают от преобразователя частоты.
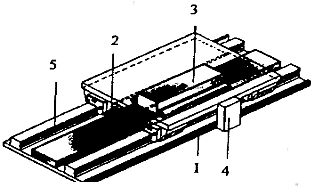
Рис. 1. Конструкция линейного однокоординатного двигателя.
Применяются несколько вариантов конструкций линейного асинхронного двигателя. Одна из них показана на рис. 1. Здесь вторичный элемент (2) - полоса, соединенный с рабочим органом, перемещается по направляющим 1 под действием бегущего электромагнитного поля, создаваемого статором 3. Такая конструкция удобна для компоновки с рабочей машинной, однако, она сопряжена со значительными потоками рассеяния поля статора, вследствие чего cosφ двигателя будет низким.
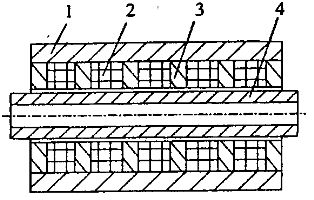
Рис.2. Линейный двигатель цилиндрической конструкции
Для увеличения электромагнитной связи между статором и вторичным элементом, последний размещают в прорезь между двумя статорами, либо конструкция двигателя выполняется в виде цилиндра (см. рис. 2). В этом случае статор двигателя представляет собой трубку (1), внутри которой расположены цилиндрические наборные катушки (2), являющиеся обмоткой статора. Между катушками размещены ферромагнитные шайбы 3, являющиеся частью магнитопровода. Вторичный элемент - шток трубчатой формы также выполнен из ферромагнитного материала.
Линейные асинхронные двигатели могут также иметь обращенную конструкцию, когда вторичный элемент неподвижен, а перемещается статор. Такие двигатели обычно применяются на транспортных средствах. В этом случае в качестве вторичного элемента используется рельс или специальная полоса, а статор размещается на подвижной тележке.
Недостатком линейных асинхронных двигателей является низкий к.п.д и связанные с этим потери энергии, прежде всего, во вторичном элементе (потери скольжения).
В последнее время кроме асинхронных начали применяться . Конструкция линейного двигателя такого типа аналогична представленной на рис. 1. Статор двигателя развернут в плоскость, а на вторичном элементе размещаются постоянные магниты. Возможен вариант обращенной конструкции, когда статор является подвижной частью, а вторичный элемент с постоянными магнитами неподвижен. Переключение обмоток статора производится в зависимости от относительного положения магнитов. С этой целью в конструкции предусмотрен датчик положения (4 - на рис. 1).
Для позиционных приводов эффективно применяются также линейные шаговые двигатели. Если развернуть в плоскость статор шагового двигателя, а вторичный элемент выполнить в виде пластины, на которой путем фрезерования канавок образованы зубцы, то при соответствующем переключении обмоток статора вторичный элемент будет совершать дискретное движение, шаг которого может быть весьма малым - до долей миллиметра. Часто применяется обращенная конструкция, в которой вторичный элемент неподвижен.
Скорость линейного шагового двигателя определяется величиной зубцового деления τ, числом фаз m и частотой переключения
Получение высоких скоростей движения не вызывает трудностей, поскольку увеличение зубцового деления и частоты не лимитируется технологическими факторами. Ограничения существуют для минимального значения τ, т.к. отношение зубцового деления к величине зазора между статором и вторичным элементом должно быть не меньше 10.
Использование дискретного привода позволяет не только упростить конструкцию механизмов, совершающих линейное однокоординатное движение, но и дает возможность с помощью одного привода получить двух или многокоординатное движение. Если на статоре подвижной части расположить ортогонально две системы обмоток, а во вторичном элементе выполнить канавки в двух перпендикулярных направлениях, то подвижный элемент будет совершать дискретное движение в двух координатах, т.е. обеспечивать перемещение на плоскости.
В этом случае возникает задача создания опоры для подвижного элемента. Для ее решения может использоваться воздушная подушка - напор воздуха, подаваемого в пространстве под подвижным элементам. Линейные шаговые двигатели развивают относительно низкое тяговое усилие и имеют низкий к.п.д. Основной областью их применения являются легкие манипуляторы, легкие сборочные станки, измерительные машины, станки для лазерной резки и другие устройства.

